Projects and Open Positions
You can find below an overview of ongoing and past projects from the TRIO Lab at Carnegie Mellon University and from prior appointments at Inria, University of Toronto, and EPFL.
Open Positions
We are always looking for Master’s and Undergraduate students to join our lab!
Interested in collaborating or joining? Get in touch and let us know which of the below projects you are interested in!
Featured
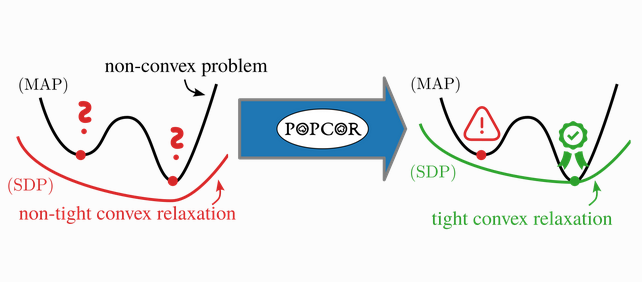
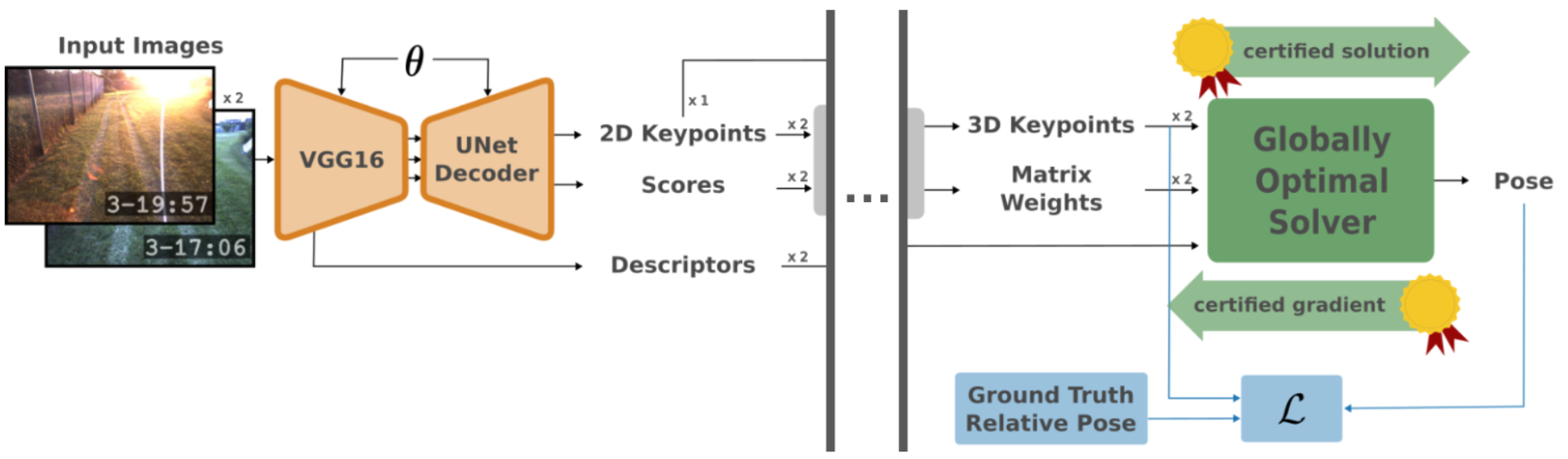
We push the boundaries of what optimization problems are solvable in robotics, by developing tools based on global optimization.
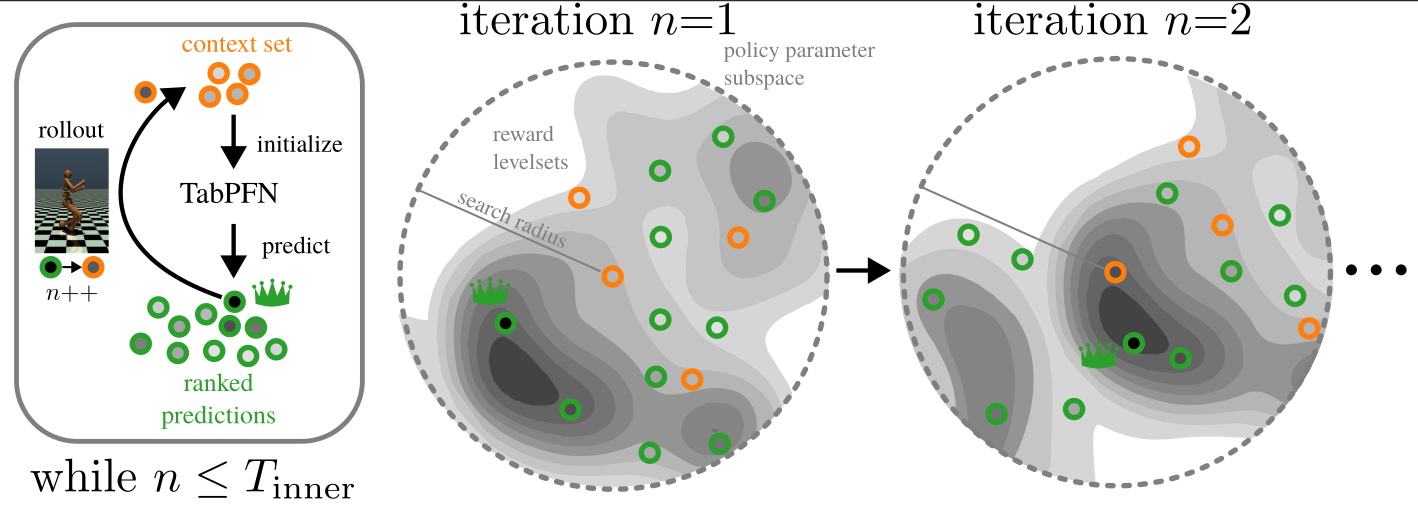
We explore how to reduce sample complexity in data-driven policy learning through global optimization tools.
We develop software and tools that automate the process of formulating, solving, and certifying global optimization problems for robotics.
We explore how to automatically design optimization problems for robotics.
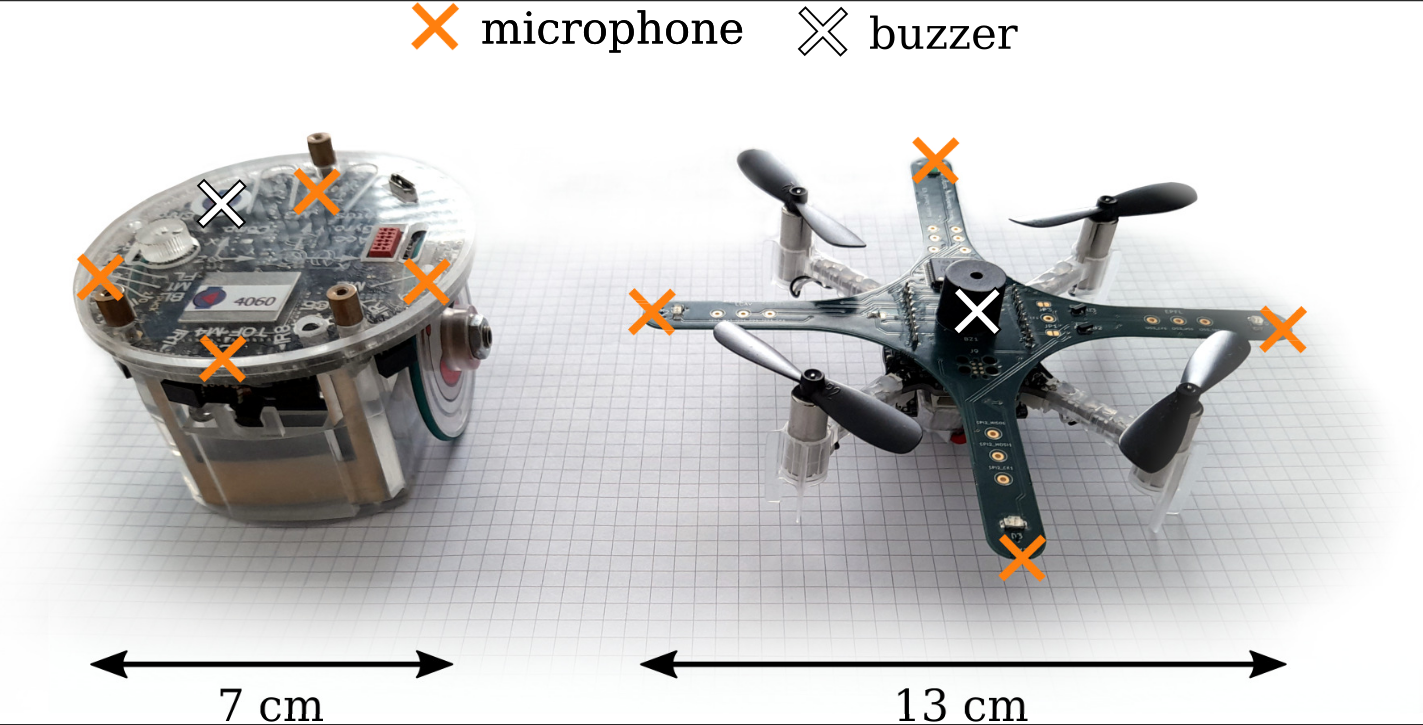
We use sound, radio frequencies, and other modalities for spatial perception for redundancy and robustness in challenging environments.