Optimal problem formulation
...closing the loop between solvers and formulation
We explore how to automatically design optimization problems for robotics.
Differentiable global optimization layers
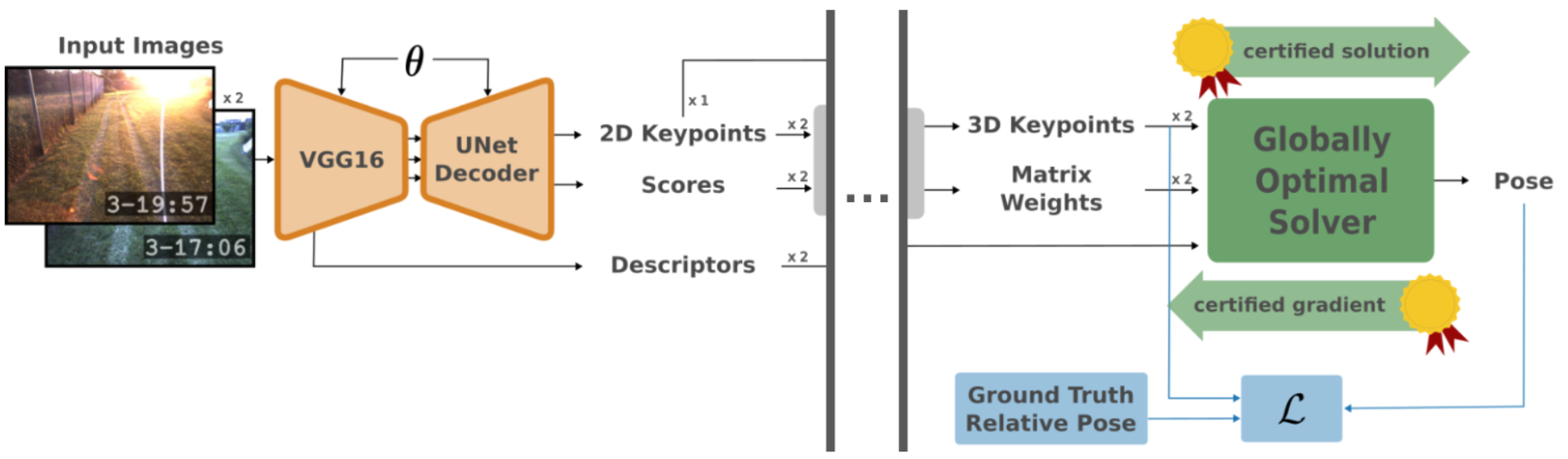
A straightforward way to close the loop between formulation and solvers is to make the solvers differentiable, allowing us to use them as layers in a larger problem including, for example, deep-learned feature extractors. Thanks to our work on SDPRLayers, one can plug global optimization tools into end-to-end learned pipelines and harvest the advantages of certifiable optimization with deep-learned feature extraction and dimensionality reduction. Ongoing collaborations are exploring how to use this tool for a variety of applications, including global sensitivity-aware feature learning and optimization landscape shaping and characterization.
Solver-aware formulation
Our works on KernelSOS and Koopman-inspired methods are also examples of formulation / modeling choices that are made with the solver in mind. In both cases, we choose model classes that are not only accurate but also amenable to global optimization tools.