Non-common sensors for robotics
... enabling more robust spatial intelligence
We use sound, radio frequencies, and other modalities for spatial perception for redundancy and robustness in challenging environments.
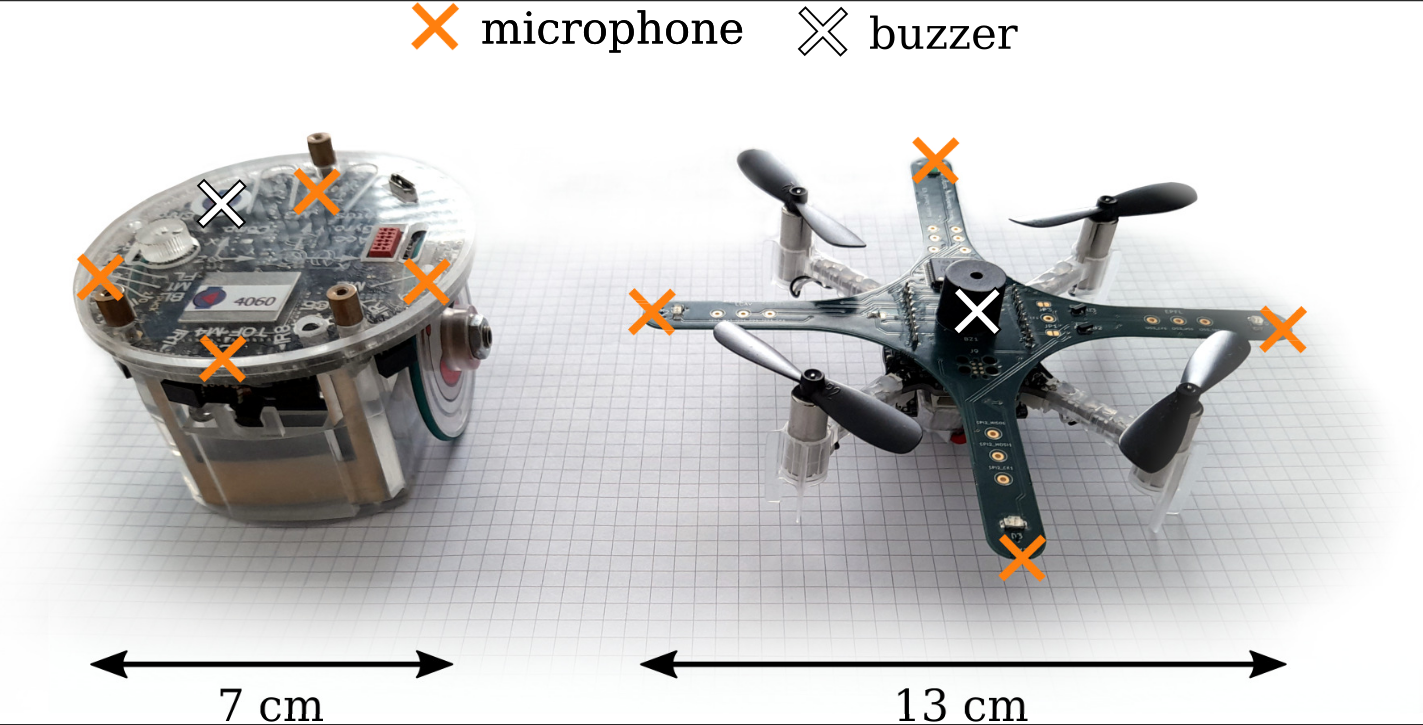
In past research we showed that walls can be reliably detected and avoided, based on sound only, on small robots such as the Crazyflie drone, and the e-puck2 education robot, using only low-cost MEMS microphones and simple buzzers as audio signals. For reproducibility, we made the custom extension deck with microphones and a buzzer for the Crazyflie drone available open-source.
In parallel research, we developed localization strategies for smartphones and connected devices based on radio frequencies – WiFi, Bluetooth, and Ultra-Wideband.
A shared problem of these non-common sensors is that they are more sparse in information than other sensors such as cameras and lidars, and thus require more careful modeling and optimization to be useful for spatial perception. We are actively exploring how to use tools from global optimization to make the most out of these non-common sensors.